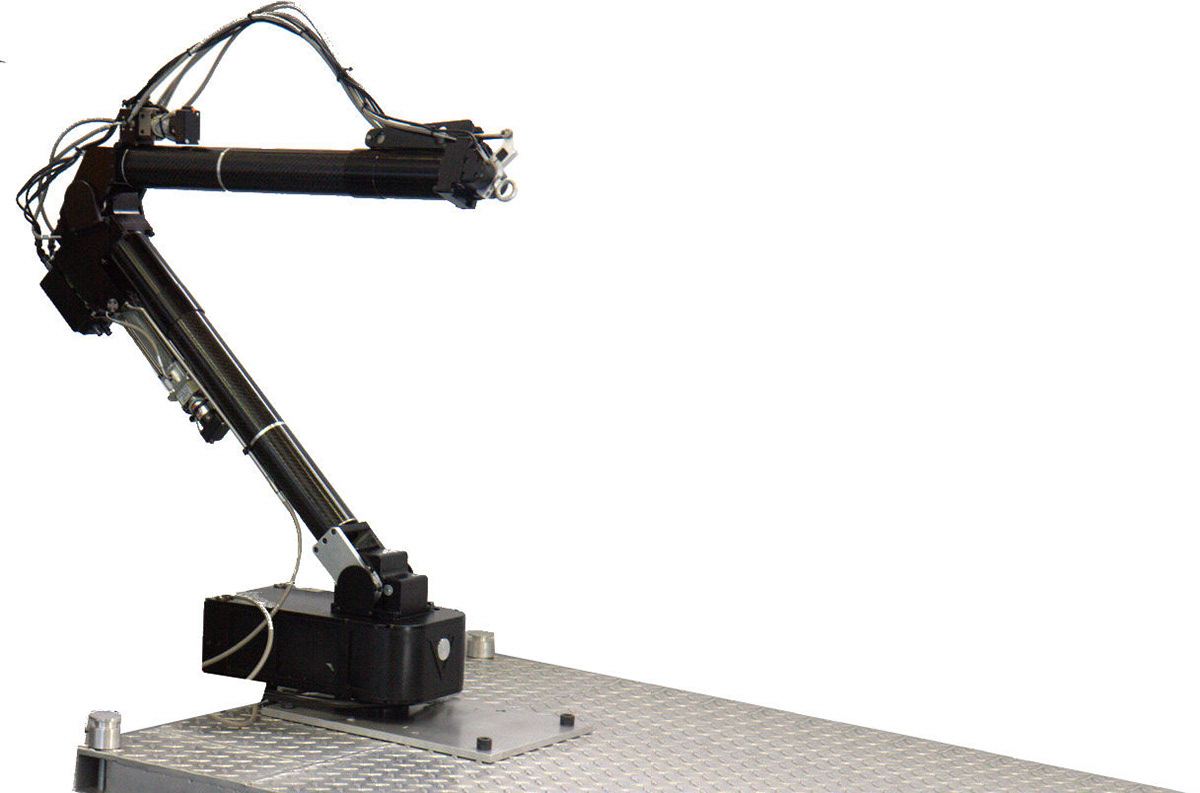
The 6DOF arm was part of a grant to build a more capable arm to mount on top of the Qinetiq Talon platform. Utilizing Vecna's hydraulic technology, we designed a 6 degree of freedom arm capable of lifting 110 lbs, but weighing only 40lbs. The arm had a self-contained hydraulic power supply, meaning the Talon could just provide 24 VDC and our system would take care of the rest. In the picture below, I designed 100% of both arm segments, as well as the elbow and wrist joint. All actuators were custom built, and contained strain gauges to accurately measure force feedback. To keep the system rigid but light weight, a carbon fiber exoskeletal design was used. Actuators for the twisting joints were directly integrated inside of the tubing.
On this project, I:
» Designed novel hydraulic actuators integrated directly into a carbon fiber exoskeleton to minimize weight and protect sensitive internal components. Arm includes valves and integrated position/force feedback sensing
» Analyzed linkages, transmission components, and structure for range of motion, torque profile, and stress
» Designed and assembled the wrist, forearm, elbow, and upper arm segments
» Authored technical sections for proposals pursuing further research and development opportunities
