RPR is a robot capable of removing cardboard boxes from shelving and intelligently placing them on a pallet. It has similar navigation capabilities to QC Bot, and can work autonomously in a warehouse.
On this project, I:
» Proposed and analyzed multiple options for navigation sensor suite and steering control override safety systems
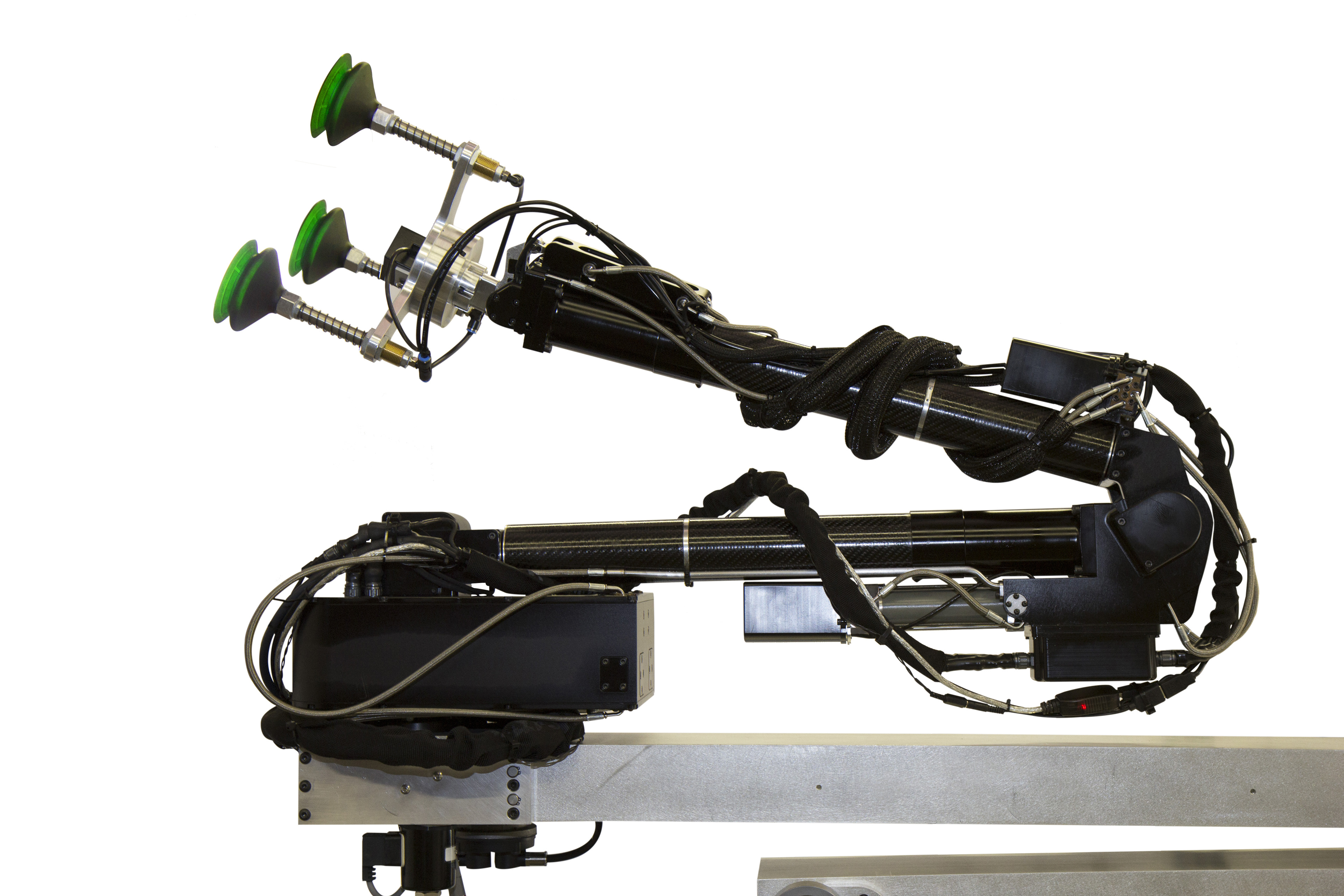
» Worked in tandem with one junior engineer to design a proof-of-concept end effector that could securely grasp a wide range of close-packed shelved cardboard boxes in a 2 second cycle time
»Debugged and fixed design issue with increasing slop in bearing assembly as 9DOF arm experienced heavy loads