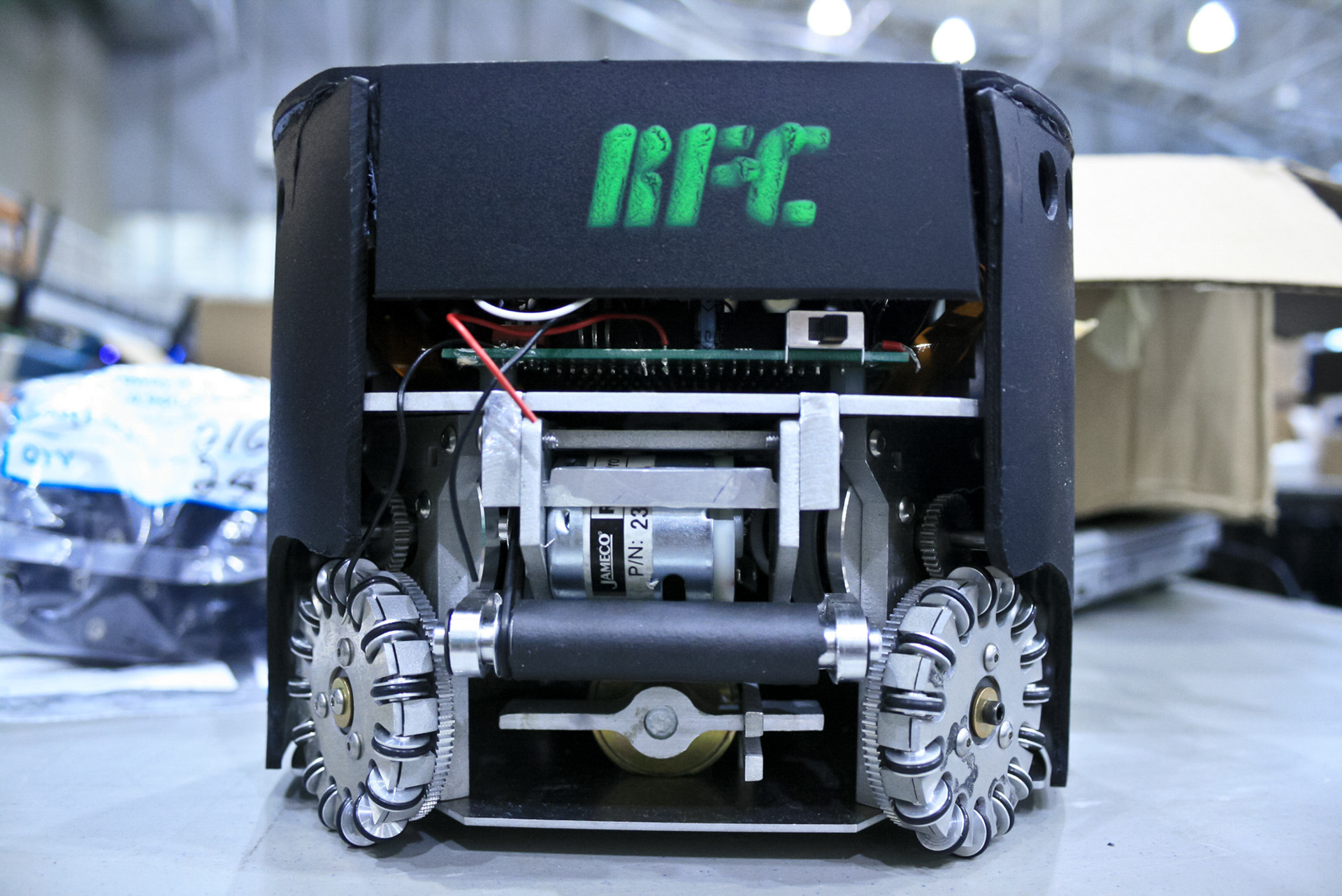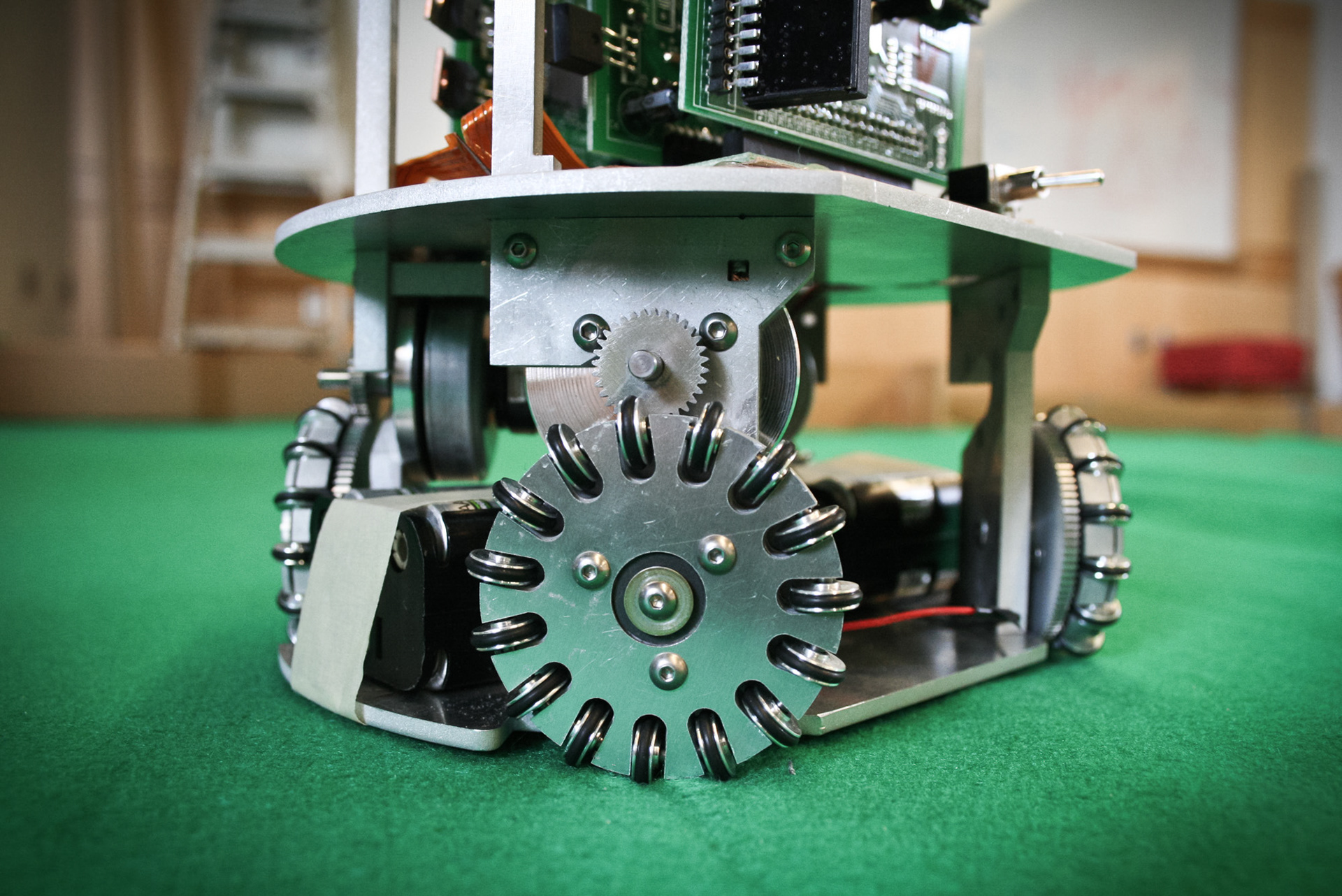
At MIT, I helped start up RFC Cambridge, a joint MIT/Harvard Small-Size Robocup team. I designed and built many of the mechanical components of the robots in my free time between classes. I also machined most of the parts utilizing an on-campus machine shop. Because the team needed to build 7+ robots, we opted for focusing on designs that could be quickly fabricated. To achieve this, I designed a two tier system of uprights and platforms that was made exclusively by waterjet. Simply feeding in the stock and the program produced useful parts (with a few tapped holes afterwards). Rollers designed to grip on felt and act as cleats for the robots didn't exist readily off the shelf. Instead, I wrote a CNC program to cut the stars out of aluminum plate, and a CNC routine to cut each individual rollers off of bar stock using a lathe. O-rings were then stretched over the individual rollers, pins place through the center, and assembled with a bearing.
On this project, I:
-Organized the ME team to prioritize design and build goals
-Spec'd motors for drivetrain and dribbler system
-Determined ideal wheel geometry to allow for tight packaging of internals without sacrificing drive performance
-Designed and fabricated custom structural parts utilizing CNC mill, lathe, and waterjet to allow for rapid fabrication of 7 robot players without significant machining labor
-Designed, machined, and built custom omni-wheels
-Debugged issues during gameplay at international competitions