For this project, I designed a 3d printed gondola and counterbalance system to create a large-scale V-plotter, capable of plotting areas up to 4' x 8'. The base work was built off of the Euphy's Polargraph design. I improved the reliability of the pen lifting system, compacted the gondola design, and generally improved the mechanics of the system to enable more reliable operation. I used a python script to calculate belt tension and angle over all reachable points to determine the ideal position of the two stepper motors, maximizing resolution within the target plotting location.
G-code is generated by a Processing script for the polagraph system that I've modified to fit the parameters of the my hardware design. This feeds from a PC into an Arduino with a motor shield, which drives two stepper motors to drive the calculated belt position, as well as a servo motor to lift the pen off of the page.
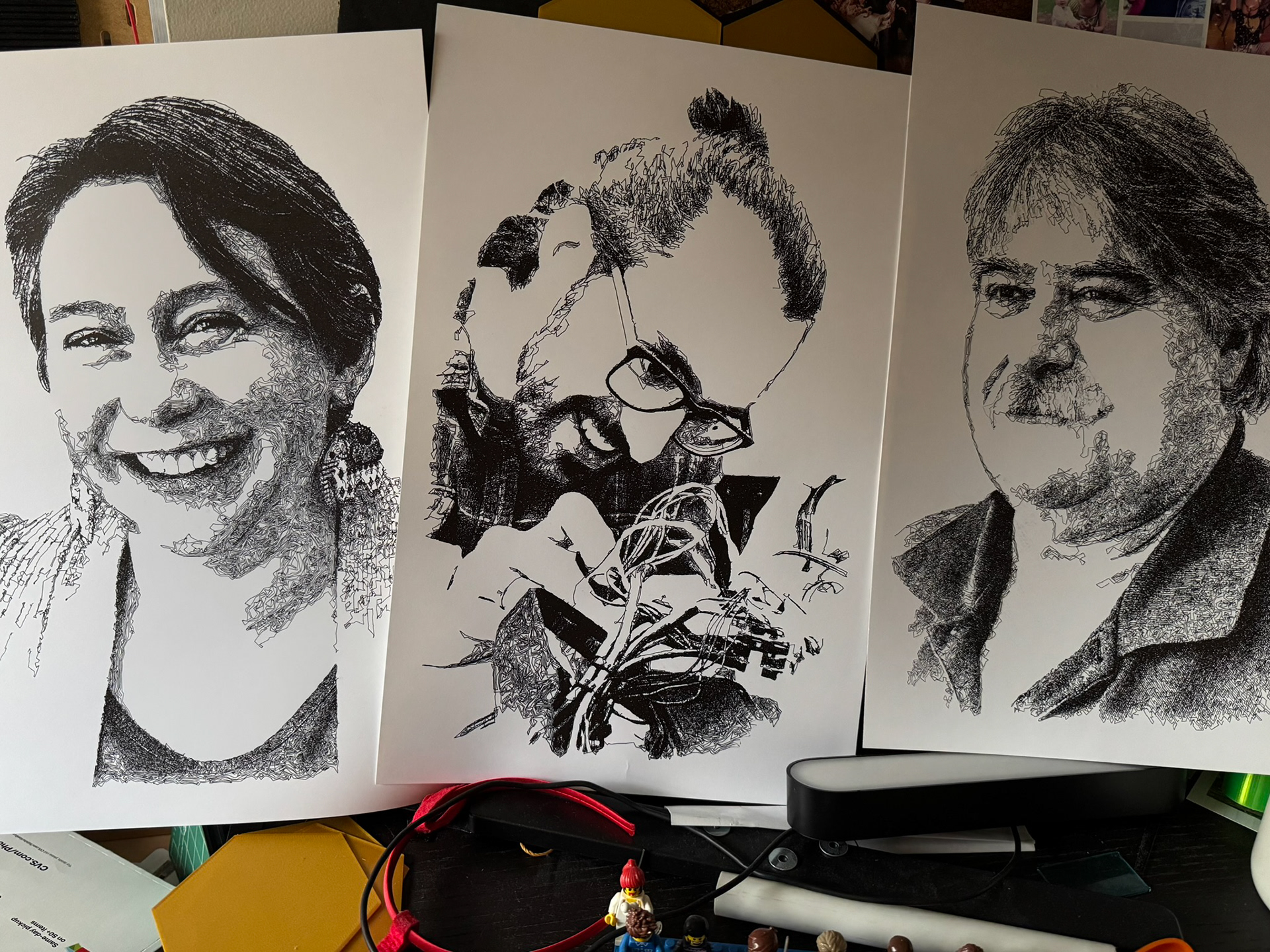
I've used the plotter to produce portraits, as well as large format signage, topographic maps, and vector art. Most of the images shown were plotted with a single Pilot G2 pen.
I'm hoping to continue developing this hardware soon by integrating the power supply, controller, and interfaces into a cleaner looking control box.